

El Laboratorio de Robótica General de la Universidad de Duke ha presentado WildFusion, un sistema robótico diseñado para navegar por entornos accidentados mediante una combinación de visión, tacto y sonido.
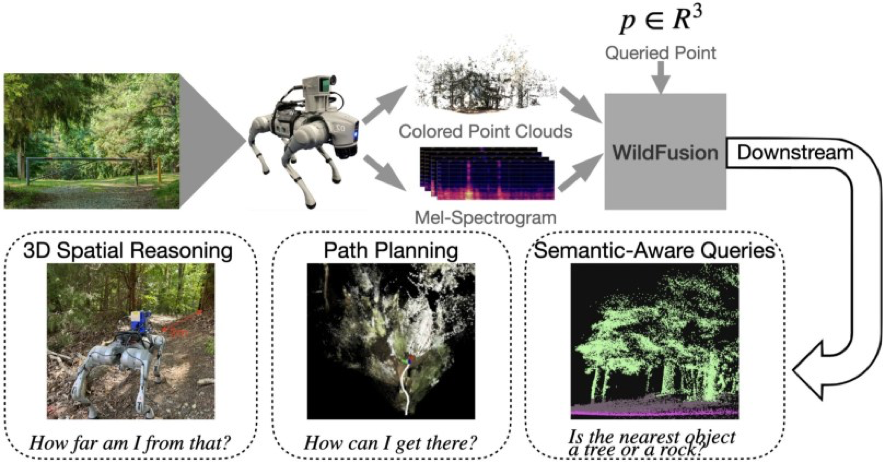
Esta plataforma de mapeo multisensorial integra cámaras RGB, LiDAR, micrófonos de contacto cerca de sus patas, sensores táctiles en sus extremidades y una unidad de medición inercial (IMU). Estos sensores permiten a WildFusion no solo ver su entorno, sino también sentirlo y oírlo, detectando las sutiles diferencias de sonido y presión de las superficies para guiar sus movimientos con una precisión asombrosa.
Los datos de estos sensores se procesan mediante un marco de aprendizaje profundo conocido como representación neuronal implícita, lo que permite al robot construir mapas continuos y detallados de su entorno. Esto le permite detectar obstáculos ocultos por la vegetación y anticipar terrenos inestables.
Al fusionar las entradas sensoriales, WildFusion responde de forma más inteligente al terreno que pisa, ajustando sus movimientos para evitar resbalones, tropiezos o atascamientos, incluso cuando las señales visuales son limitadas. En pruebas de campo realizadas en el Parque Estatal del Río Eno, Carolina del Norte, WildFusion superó con éxito terrenos complejos, incluyendo vegetación densa, lechos de arroyos y senderos irregulares.
Su capacidad para identificar puntos de apoyo estables y adaptarse rápidamente lo convierte en una herramienta muy prometedora para la respuesta ante desastres, donde la navegación entre escombros es crucial, y para misiones que requieren acceso remoto al medio ambiente.
El sistema de mapeo multisensorial del robot WildFusion podría desempeñar un papel importante en el futuro tanto en la recuperación tras desastres naturales como en el trabajo de campo en zonas remotas.
Diseñado con un enfoque modular, WildFusion también puede incorporar herramientas como cámaras termográficas o sensores químicos. Esta adaptabilidad lo posiciona como una plataforma versátil para el monitoreo ambiental, la agricultura de precisión y la exploración en áreas demasiado peligrosas o remotas para el acceso humano.